Andrea Del Prete
Andrea Del Prete
Home
Talks
Courses
Students
Publications
Contact
CV
Light
Dark
Automatic
article-journal
Pietro Noah Crestaz
,
Ludovic de Matteis
,
Elliot Chane-Sane
,
Nicolas Mansard
,
Andrea Del Prete
Cite
URL
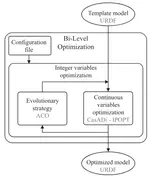
Addressing Reachability and Discrete Component Selection in Robotic Manipulator Design Through Kineto-Static Bi-Level Optimization
Enrico Mingo Hoffman
,
Daniel Costanzi
,
Gabriele Fadini
,
Narcis Miguel
,
Andrea Del Prete
,
Luca Marchionni
Cite
DOI
URL
ALPINE: A climbing robot for operations in mountain environments
Mountain slopes are perfect examples of harsh environments in which humans are required to perform difficult and dangerous operations …
Michele Focchi
,
Andrea Del Prete
,
Daniele Fontanelli
,
Marco Frego
,
Angelika Peer
,
Luigi Palopoli
Cite
arXiv
URL
Video
Co-designing versatile quadruped robots for dynamic and energy-efficient motions
This paper presents a bi-level optimization framework to concurrently optimize a quadruped hardware and control policies for achieving …
Gabriele Fadini
,
Shivesh Kumar
,
Rohit Kumar
,
Thomas Flayols
,
Andrea Del Prete
,
Justin Carpentier
,
Philippe Souères
Cite
HAL
URL
Hybrid Lyapunov-based feedback stabilization of bipedal locomotion based on reference spreading
We propose a hybrid formulation of the linear inverted pendulum model for bipedal locomotion, where the foot switches are triggered …
Riccardo Bertollo
,
Gianni Lunardi
,
Andrea Del Prete
,
Luca Zaccarian
Cite
arXiv
URL
Optimization-Based Control for Dynamic Legged Robots
In a world designed for legs, quadrupeds, bipeds, and humanoids have the opportunity to impact emerging robotics applications from …
Patrick M. Wensing
,
Michael Posa
,
Yue Hu
,
Adrien Escande
,
Nicolas Mansard
,
Andrea Del Prete
Cite
DOI
arXiv
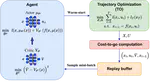
CACTO: Continuous Actor-Critic With Trajectory Optimization - Towards Global Optimality
This letter presents a novel algorithm for the continuous control of dynamical systems that combines Trajectory Optimization (TO) and …
Gianluigi Grandesso
,
Elisa Alboni
,
Gastone P.Rosati Papini
,
Patrick M. Wensing
,
Andrea Del Prete
Cite
DOI
arXiv
Modeling the Human Gait Phases by Using Bèzier Curves to Generate Walking Trajectories for Lower-Limb Exoskeletons
The clinical usage of powered exoskeletons for the rehabilitation of patients affected by lower limb disorders has been constantly …
Matteo Zuccatti
,
Gaia Zinni
,
Stefano Maludrottu
,
Valentina Pericu
,
Matteo Laffranchi
,
Andrea Del Prete
,
Lorenzo De Michieli
,
Christian Vassallo
Cite
DOI
Optimization-Based Control for Dynamic Legged Robots
In a world designed for legs, quadrupeds, bipeds, and humanoids have the opportunity to impact emerging robotics applications from …
Patrick M. Wensing
,
Michael Posa
,
Yue Hu
,
Adrien Escande
,
Nicolas Mansard
,
Andrea Del Prete
Cite
DOI
arXiv
Orientation Control System: Enhancing Aerial Maneuvers for Quadruped Robots
For legged robots, aerial motions are the only option to overpass obstacles that cannot be circumvented with standard locomotion gaits. …
Francesco Roscia
,
Andrea Cumerlotti
,
Andrea Del Prete
,
Claudio Semini
,
Michele Focchi
Cite
DOI
arXiv
Video
»
Cite
×