Andrea Del Prete
Andrea Del Prete
Home
Talks
Courses
Students
Publications
Contact
CV
Light
Dark
Automatic
paper-conference
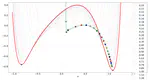
Analytical Integral Global Optimization
Numerical optimization has been the workhorse powering the success of many machine learning and artificial intelligence tools over the …
Sebastien Labbe
,
Andrea Del Del Prete
Cite
paper
code
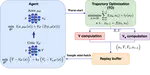
CACTO-SL: Using Sobolev Learning to improve Continuous Actor-Critic with Trajectory Optimization
Trajectory Optimization (TO) and Reinforcement Learning (RL) are powerful and complementary tools to solve optimal control problems. On …
Elisa Alboni
,
Gianluigi Grandesso
,
Gastone P. Rosati Papini
,
Justin Carpentier
,
Andrea Del Prete
Cite
arXiv
Video
Code
Efficient Reinforcement Learning for Jumping Monopods
In this work, we consider the complex control problem of making a monopod reach a target with a jump. The monopod can jump in any …
Riccardo Bussola
,
Michele Focchi
,
Andrea Del Prete
,
Daniele Fontanelli
,
Luigi Palopoli
Cite
arXiv
URL
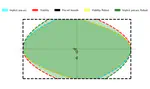
Receding-Constraint Model Predictive Control using a Learned Approximate Control-Invariant Set
In recent years, advanced model-based and data-driven control methods are unlocking the potential of complex robotics systems, and we …
Gianni Lunardi
,
Asia La Rocca
,
Matteo Saveriano
,
Andrea Del Prete
Cite
arXiv
Code
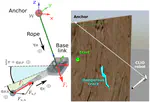
CLIO: a Novel Robotic Solution for Exploration and Rescue Missions in Hostile Mountain Environments
Rescue missions in mountain environments are hardly achievable by standard legged robots—because of the high slopes—or by flying …
Michele Focchi
,
Mohamed Bensaadallah
,
Marco Frego
,
Angelika Peer
,
Daniele Fontanelli
,
Andrea Del Prete
,
Luigi Palopoli
Cite
arXiv
Video
Robust Satisfaction of Joint Position and Velocity Bounds in Discrete-Time Acceleration Control of Robot Manipulators
This paper deals with the robust control of fully-actuated robots subject to joint position, velocity and acceleration bounds. Robotic …
Erik Zanolli
,
Andrea Del Prete
Cite
paper
code
Nonlinear Stochastic Trajectory Optimization Legged Robots
Ahmad Gazar
,
Majid Khadiv
,
Sebastien Kleff
,
Andrea Del Prete
,
Ludovic Righetti
Cite
arXiv
Computational design of energy-efficient legged robots : Optimizing for size and actuators
Gabriele Fadini
,
Thomas Flayols
,
Andrea Del Prete
,
Nicolas Mansard
,
Philippe Souères
Cite
Stochastic and Robust MPC for Bipedal Locomotion : A Comparative Study on Robustness and Performance
Ahmad Gazar
,
Majid Khadiv
,
Andrea Del Prete
,
Ludovic Righetti
Cite
arXiv
SL1M: Sparse L1-norm Minimization for contact planning on uneven terrain
One of the main challenges of planning legged locomotion in complex environments is the combinatorial contact selection problem. Recent …
Steve Tonneau
,
Daeun Song
,
Pierre Fernbach
,
Nicolas Mansard
,
Michel Taix
,
Andrea Del Prete
Cite
arXiv
URL
»
Cite
×