Robust Co-Design: Coupling Morphology and Feedback Design Through Stochastic Programming
Abstract
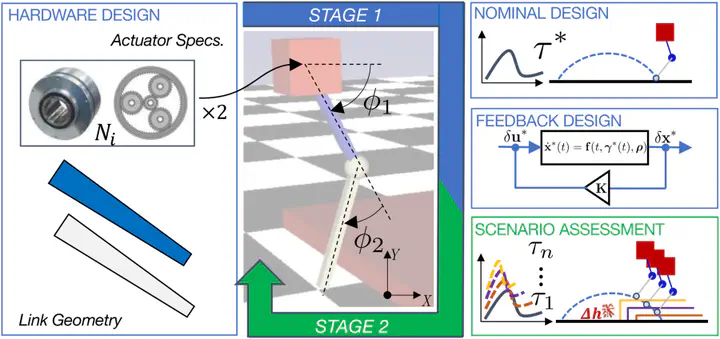
This article proposes a new framework for the computational design of robots that are robust to disturbances. The framework combines trajectory optimization (TO) and feedback control design to produce robots with improved performance under perturbations by co-optimizing a nominal trajectory alongside a feedback policy and the system morphology. Stochastic programming (SP) methods are used to address these perturbations via uncertainty models in the problem specification, resulting in motions that are easier to stabilize via feedback. Two robotic systems serve to demonstrate the potential of the method: a planar manipulator and a jumping monopod robot. The co-optimized robots achieve higher performance compared to state-of-the-art solutions where the feedback controller is designed separately from the physical system. Specifically, the co-designed controllers show higher tracking accuracy and improved energy efficiency (e.g., 91% decrease in tracking error and ≈5% decrease in energy consumption for a manipulator) compared to linear quadratic regulator applied to a design optimized for nominal conditions.