Andrea Del Prete
Andrea Del Prete
Home
Talks
Courses
Students
Publications
Contact
CV
Light
Dark
Automatic
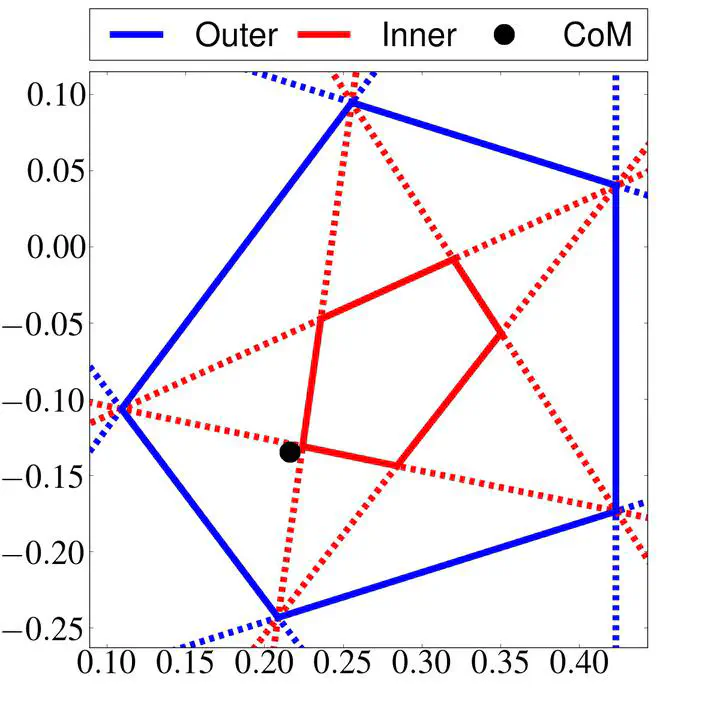
Fast Algorithms to Test Robust Static Equilibrium for Legged Robots
Andrea Del Prete
,
Steve Tonneau
,
Nicolas Mansard
January, 2016
Cite
DOI
URL
Type
Conference paper
Publication
IEEE International Conference on Robotics and Automation (ICRA)
Cite
×