Andrea Del Prete
Andrea Del Prete
Home
Talks
Courses
Students
Publications
Theses
Contact
CV
Light
Dark
Automatic
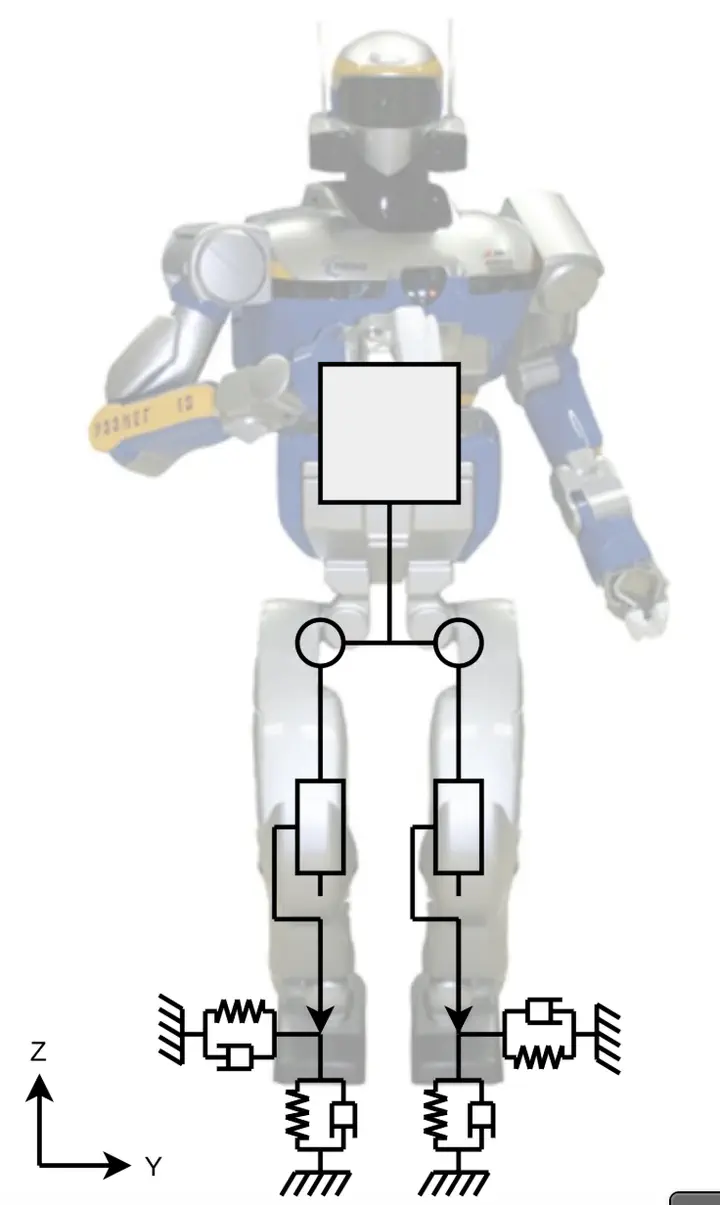
Reactive Balance Control for Legged Robots under Visco-Elastic Contacts
Thomas Flayols
,
Andrea Del Prete
,
Majid Khadiv
,
Nicolas Mansard
,
Ludovic Righetti
January, 2021
Cite
Type
Journal article
Publication
Applied Sciences
balance control
Cite
×