Andrea Del Prete
Andrea Del Prete
Home
Talks
Courses
Students
Publications
Contact
CV
Light
Dark
Automatic
humanoid robots
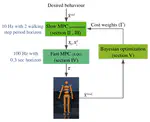
Robust Walking Based on MPC with Viability Guarantees
Model predictive control (MPC) has shown great success for controlling complex systems, such as legged robots. However, when closing …
Mohammad Hasan Yeganegi
,
Majid Khadiv
,
Andrea Del Prete
,
S. Ali A. Moosavian
,
Ludovic Righetti
Cite
DOI
arXiv
An Efficient Acyclic Contact Planner for Multiped Robots
We present a framework capable of producing contact plans describing complex multiped motions (including humanoid): standing up, …
Steve Tonneau
,
Andrea Del Prete
,
Julien Pettre
,
Chonhyon Park
,
Dinesh Manocha
,
Nicolas Mansard
Cite
DOI
arXiv
Cite
×