Andrea Del Prete
Andrea Del Prete
Home
Talks
Courses
Students
Publications
Contact
CV
Light
Dark
Automatic
Optimization and optimal control
Co-designing versatile quadruped robots for dynamic and energy-efficient motions
This paper presents a bi-level optimization framework to concurrently optimize a quadruped hardware and control policies for achieving …
Gabriele Fadini
,
Shivesh Kumar
,
Rohit Kumar
,
Thomas Flayols
,
Andrea Del Prete
,
Justin Carpentier
,
Philippe Souères
Cite
HAL
URL
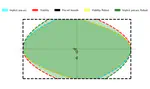
Robust Satisfaction of Joint Position and Velocity Bounds in Discrete-Time Acceleration Control of Robot Manipulators
This paper deals with the robust control of fully-actuated robots subject to joint position, velocity and acceleration bounds. Robotic …
Erik Zanolli
,
Andrea Del Prete
Cite
paper
code
One robot for many tasks: Versatile co-design through stochastic programming
Versatility is one of the main factors driving the adoption of robots on the assembly line and in other applications. Compared to …
Gabriel Bravo-Palacios
,
Andrea Del Prete
,
Patrick M. Wensing
Cite
DOI
Cite
×