Andrea Del Prete
Andrea Del Prete
Home
Talks
Courses
Students
Publications
Contact
CV
Light
Dark
Automatic
robot safety
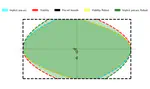
Robust Satisfaction of Joint Position and Velocity Bounds in Discrete-Time Acceleration Control of Robot Manipulators
This paper deals with the robust control of fully-actuated robots subject to joint position, velocity and acceleration bounds. Robotic …
Erik Zanolli
,
Andrea Del Prete
Cite
paper
code
Cite
×