Andrea Del Prete
Andrea Del Prete
Home
Talks
Courses
Students
Publications
Contact
CV
Light
Dark
Automatic
Trajectory Optimization
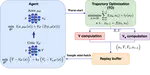
CACTO-SL: Using Sobolev Learning to improve Continuous Actor-Critic with Trajectory Optimization
Trajectory Optimization (TO) and Reinforcement Learning (RL) are powerful and complementary tools to solve optimal control problems. On …
Elisa Alboni
,
Gianluigi Grandesso
,
Gastone P. Rosati Papini
,
Justin Carpentier
,
Andrea Del Prete
Cite
arXiv
Video
Code
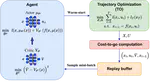
CACTO: Continuous Actor-Critic With Trajectory Optimization - Towards Global Optimality
This letter presents a novel algorithm for the continuous control of dynamical systems that combines Trajectory Optimization (TO) and …
Gianluigi Grandesso
,
Elisa Alboni
,
Gastone P.Rosati Papini
,
Patrick M. Wensing
,
Andrea Del Prete
Cite
DOI
arXiv
Optimization and Learning for Robot Control
A 48-hour course for master students focusing on modern optimal control and reinforcement learning techniques for robot control
Jan 1, 2020
Code
Slides
Video
Optimization-based Control of Legged Robots
A 12-hour course for PhD students about reactive control (TSID) and trajectory optimization for legged robots.
Jan 1, 2020
Code
Video
Cite
×