 Screenshot from the video
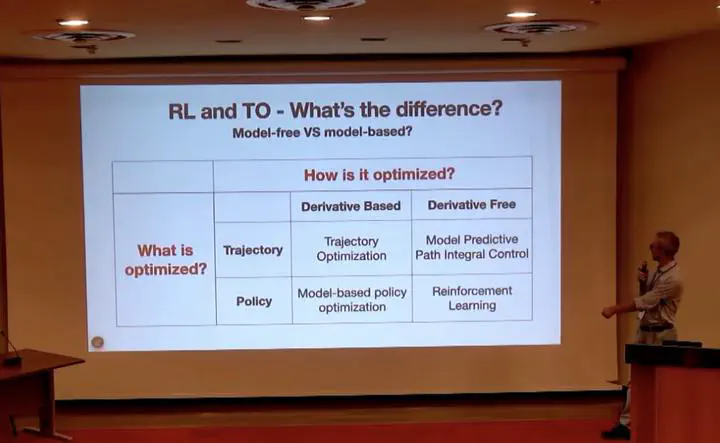
Screenshot from the videoReinforcement Learning (RL) and Trajectory Optimization (TO) are two powerful yet complementary approaches to control and decision-making.
Trajectory Optimization is data-efficient, exploits dynamics derivatives, and naturally handles constraints. However, it can suffer from poor local minima and requires significant online computation.
Reinforcement Learning, on the other hand, is derivative-free, less sensitive to local minima, and enables fast policy execution at deployment. But it is typically data-inefficient and does not explicitly account for constraints.
The central question of this talk is:
How can we combine RL and TO to exploit the strengths of both?
A Taxonomy of RL–TO Architectures
The talk proposes a structured classification of approaches for combining RL and TO.
1. Sequential Approaches
TO → RL (Imitation)
- Use TO (e.g., MPC) to generate trajectories.
- Train a neural policy to imitate them.
- Removes online optimization at deployment.
- Cannot improve the original TO solution.
RL → TO (RL-Supported TO)
- Train an actor–critic.
- Use the actor to warm-start TO.
- Use the critic as a terminal cost.
- Guides TO toward better solutions.
- Does not improve RL efficiency.
2. Coupled TO Imitation
- TO and RL influence each other during training.
- Example: Guided Policy Search.
- TO produces trajectories that are easier for neural policies to represent.
3. TO Inside RL (Tight Integration)
This is the most powerful class of methods, which have the potential to speed-up RL training, speed-up TO online computation, while also guiding TO towards high-quality solutions. I discuss questions such as:
- Where should TO be introduced?
- What should be learned?
- Should TO solve the same problem as RL?
CACTO: Continuous Actor-Critic with Trajectory Optimization
The final part of this talk presents CACTO, a tightly integrated actor–critic framework with derivative-based TO.
Core ideas:
- The actor generates a warm-start trajectory.
- TO refines it using dynamics derivatives.
- The critic is trained using TO’s cost-to-go.
- The actor is improved by minimizing the learned Q-function.
- Exploration occurs in the state space rather than the action space.
This creates a virtuous cycle:
- TO improves RL sample efficiency.
- RL guides TO toward globally better solutions.
Experiments on integrator systems, a car model, and a manipulator show that CACTO significantly improves the quality of TO solutions compared to random or standard RL warm-starts.
Key Takeaways
- The architectural choice is fundamental when combining RL and TO.
- Warm-start learning is often more powerful than learning only a terminal cost.
- Dynamics derivatives (from TO) and global value shaping (from RL) are complementary.
- Tight integration improves both data efficiency and solution quality.
Conclusion:
The most effective combination is not simple imitation or post-hoc refinement, but a tight coupling where RL and TO solve the same problem and guide each other toward globally optimal solutions.
Andrea Del Prete
Professor of Robotics
My research focuses on the development of algorithms to make robots smart.